





活动流程

活动说明

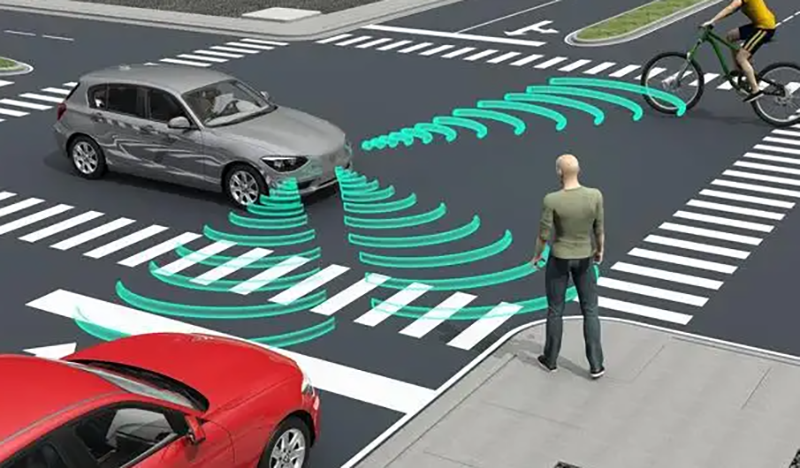
在某知名汽车垂直媒体对一系列汽车进行的“AEB智驾大横评”里,测试结果让许多汽车爱好者大跌眼镜;诸多主打智能驾驶的新能源汽车在系统侦测到障碍物时并未主动刹车,反倒是个别传统车企的车辆实现了有效制动,当然其中也有未能有效侦测和有效刹车的车辆,在这里就不讨论了。

面对测试结果有网友提出了一个很有意义的问题:
为何不能实现“侦测到即刹车”呢?
在其测试结果里显示部分车辆已经侦测到障碍物,但是仅仅通过屏幕进行闪烁提示或伴随语音提示;如果能够将提示换成自主有效制动,似乎许多不必要的碰撞也就不会发生了。反之,这样的设定是不是画蛇添足或设计漏洞呢?相信会有不少汽车爱好者存在相同的疑惑,其中有两个原因。

假设场景·脱困
如果系统设定为“侦测到即刹车”的话,在实际用车场景中会出现更多麻烦。
不是所有的道路都是铺装公路,不是所有的道路侧面或后方都是平面;假设车辆在狭窄的侧向停车位里倒车,AEB系统设定为“侦测到即刹车”则会难以倒车。因为有一些停车位的尺寸很小,前后车停好之后,车辆在倒车和挪车过程中与前后车保险杠的间距可能只有几厘米到十几厘米。那么在倒车的时候AEB一旦按照设定距离用传感器进行测距,车辆则难免出现“倒一下停一下”甚至根本开不到预计停车的距离。所以AEB系统既不能全时开启,也不能设定为“侦测到即刹车。”

类似的情况还会出现在户外非铺装道路的驾驶场景中,有些车辆难免会在乡村小路上行驶;而道路两侧又难免会有一些野花野草,这些花草的高度可以长到几十厘米,没有人去打理还有可能长到路边。
于是在倒车或挪车的过程中则有可能因传感器侦测到花花草草而主动刹车。
尤其是越野车。
这些车辆会有很多的时间在此类道路行驶,并且其中还会有一些崎岖道路;试想在大角度下坡、上坡或翻越崎岖道路的时候,传感器侦测到与前方崎岖道路距离过近而刹车,车辆是否有可能失控呢?
当然AEB可以手动关闭,但如果司机忘记了手动关闭,那么这样的安全配置反而可能成为“危险配置。”

传感器不够智能
上述难题是有解的,只是现在还在无解阶段。
AEB系统之所以不是最优选程序,系统需要尊重驾驶员的第一意图;原因正是要考虑到第一节所描述的场景。
然而这样说明了司机显然是更聪明的,其知道哪些障碍物是真障碍物,那哪些障碍物又能适当的压一下——同理,如果AEB系统能够做到像司机一样的聪明,那么AEB也就不用设定出上述程序了。
可是现在却做不到让传感器和程序系统真正的聪明又敏捷。
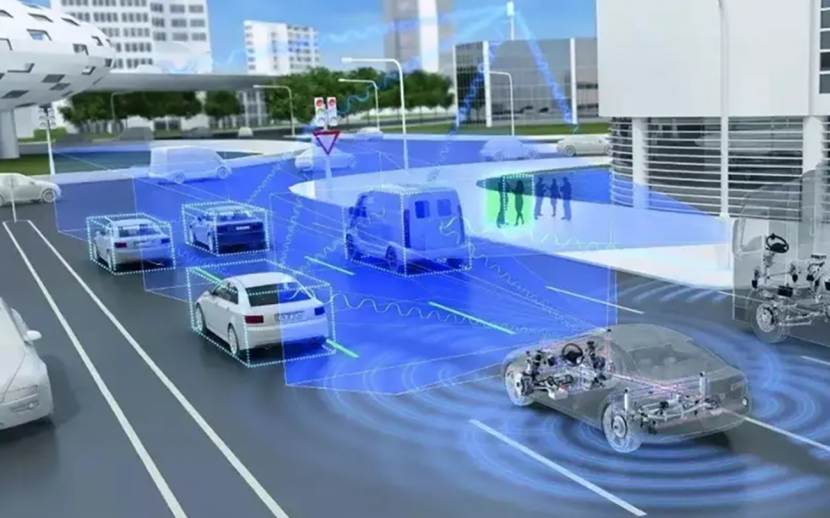
因为超声波雷达依靠机械波无法实现立体测绘,毫米波雷达虽然理论上可以实现对障碍物的立体测绘与理解,可是目前为止的主要车辆所使用的毫米波雷达都只能测距。于是就的用上可以立体测绘并且搞清楚障碍物类型的激光雷达,但是这又会对系统的算力和整体水平带来很大的挑战,从技术角度和成本角度分析的结论都是难以实现。
车辆视觉系统中的摄像头理论上更容易实现,可是同样需要巨大的算力和海量的数据储存,理论上同样难以实现。
正确用车方法
要知道现在的一些智能汽车连异形车辆、反光锥桶或复杂的信号灯都无法识别,想要在各种各样的、不确定的驾驶场景中识别各类障碍物的类型以做出正确的判断会非常难。所以AEB这种主动制动系统实际只是一种人工安全驾驶的补充,有这套程序是锦上添花,没有这套程序也无关紧要;毕竟现在的行车安全依然需要由驾驶员来保证,这是写入技术标准的规定,所有司机都有必要了解。

关于智能“辅助驾驶组合”的其他功能程序也可以下一样的结论,比如全速自适应巡航、并线辅助、车道保持、匝道进入、拨杆变道等等。
这些功能的正确理解是“在驾驶员的关注之下使用,以保证行车安全,同时一定程度降低驾驶疲劳程度。”
仅此而已。
不能以为有了AEB/L2就能万事大吉,这套系统程序对于驾驶员而言的功能是非常有限的。

 声明:本文由太平洋号作者撰写,观点仅代表个人,不代表太平洋汽车。文中部分图片来源网络,感谢原作者。
声明:本文由太平洋号作者撰写,观点仅代表个人,不代表太平洋汽车。文中部分图片来源网络,感谢原作者。
 18
18 04-15
04-15 分享
分享 46 04-29
46 04-29 57 04-29
57 04-29 68 04-29
68 04-29 53 04-29
53 04-29 80 04-29
80 04-29 0 04-29
0 04-29 75 04-29
75 04-29 30 04-29
30 04-29 50 04-29
50 04-29 59 04-29
59 04-29
我来说两句