




活动流程

活动说明

文|金融街老李
随着人工智能快速发展,变革是今年汽车产业的主旋律,3月18日,理想汽车发布了下一代自动驾驶架构MindVLA,这项整合空间智能、语言智能与行为智能的视觉-语言-行为大模型,标志着自动驾驶技术进入了一个新的发展阶段。
理想汽车下一代自动驾驶技术的发布,顺应了发展潮流,今天老李就和大家一起聊聊,为什么说MindVLA是自动驾驶技术的里程碑? MindVLA对于行业发展有什么意义?理想汽车又是如何在变革中引领产业重构的?
技术里程碑
当前,汽车智能驾驶正在快速市场化,根据中汽中心发布的数据,2025年一季度,中国L2级及以上辅助驾驶渗透率已突破65%,城市NOA功能覆盖城市数量较去年同期增长超200%,可以说,相比低空飞行和具身智能这两大产业,智能汽车已经真正实现了规模化。
过去,汽车行业自动驾驶技术更多依赖于机器的采集、处理和执行,但我们从底层逻辑的层面讲,汽车只有按照人类的驾驶逻辑实现的自动驾驶,才是真正的自动驾驶。今年以来,随着人工智能技术在自动驾驶领域的深度应用,自动驾驶技术出现了跨越式的发展。
随着理想汽车最新发布了MindVLA自动驾驶系统,老李认为,自动驾驶技术出现了一个新的方向——智能体,凭借人工智能与自动驾驶的深度融合,正在改写行业竞争规则,老李认为,后续会有更多的企业会沿着理想汽车的路径开展自动驾驶技术研发,显然,理想汽车走在了行业最前列。
什么是MindVLA?
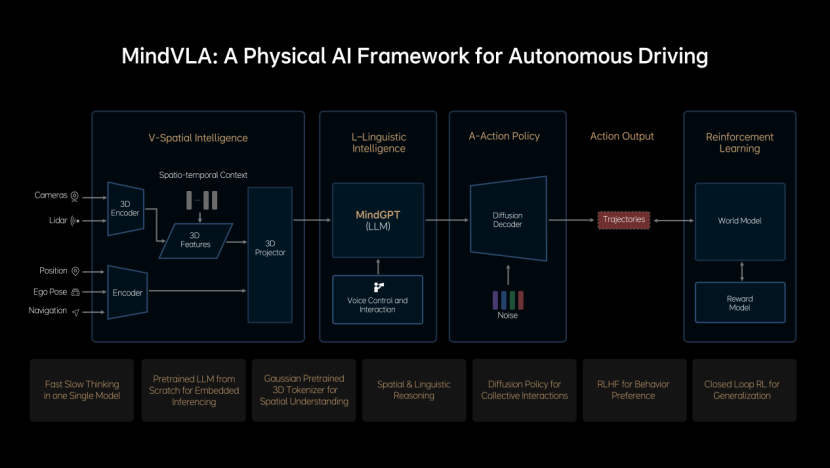
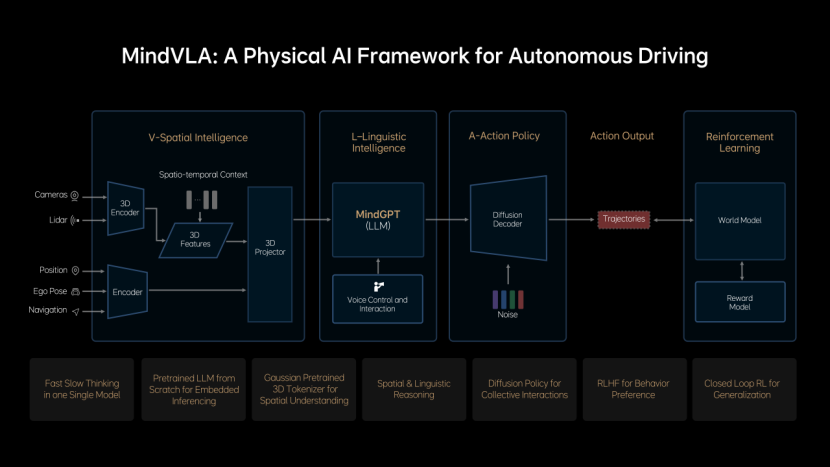
基于端到端+VLM双系统架构的最佳实践,及对前沿技术的敏锐洞察,理想自研VLA模型——MindVLA。MindVLA是视觉-语言-行为大模型,是机器人大模型的新范式,它将空间智能、语言智能和行为智能统一在一个模型里。MindVLA赋予模型强大的3D空间理解能力、逻辑推理能力和行为生成能力,让自动驾驶能够感知、思考和适应环境。
MindVLA打破自动驾驶技术框架设计的传统模式,使用能够承载丰富语义,且具备出色多粒度、多尺度3D几何表达能力的3D高斯(3D Gaussian)这一优良的中间表征,充分利用海量数据进行自监督训练,极大提升了下游任务性能。
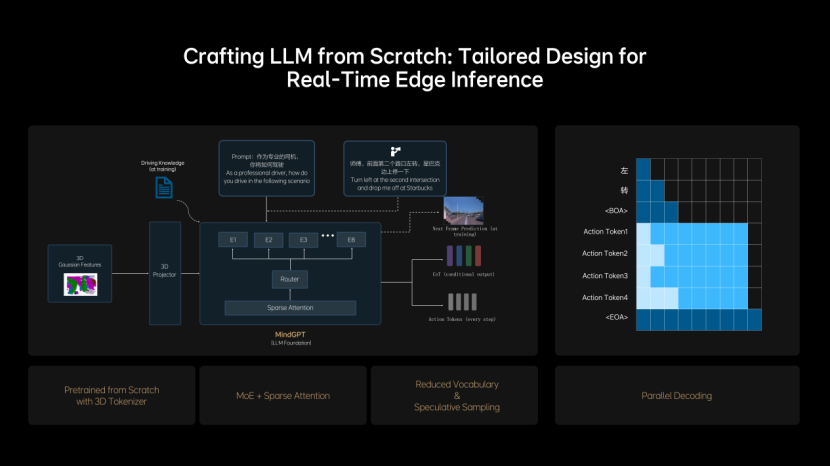
理想从0开始设计和训练了适合MindVLA的LLM基座模型,采用MoE混合专家架构,引入Sparse Attention(稀疏注意力),实现模型稀疏化,保证模型规模增长的同时,不降低端侧的推理效率。基座模型训练过程中,理想加入大量3D数据,使模型具备3D空间理解和推理能力。为了进一步激发模型的空间智能,理想加入了未来帧的预测生成和稠密深度的预测等训练任务。
LLM基座模型获得3D空间智能的同时,还需要进一步提升逻辑推理能力。理想训练LLM基座模型学习人类的思考过程,让快慢思考有机结合到同一模型中,并可以实现自主切换快思考和慢思考。为了把NVIDIA Drive AGX的性能发挥到极致,MindVLA采取小词表结合投机推理,以及创新性地应用并行解码技术,进一步提升了实时推理的速度。至此,MindVLA实现了模型参数规模与实时推理性能之间的平衡。
MindVLA利用Diffusion将Action Token解码成优化的轨迹,并通过自车行为生成和他车轨迹预测的联合建模,提升在复杂交通环境中的博弈能力。同时Diffusion可以根据外部条件,例如风格指令,动态调整生成结果。为了解决Diffusion模型效率低的问题,MindVLA采用Ordinary Differential Equation(常微分方程)采样器,实现了2-3步就能完成高质量轨迹的生成。面对部分长尾场景,理想建立起人类偏好数据集,并且创新性地应用RLHF(基于人类反馈的强化学习)微调模型的采样过程,最终使MindVLA能够学习和对齐人类驾驶行为,显著提升安全下限。
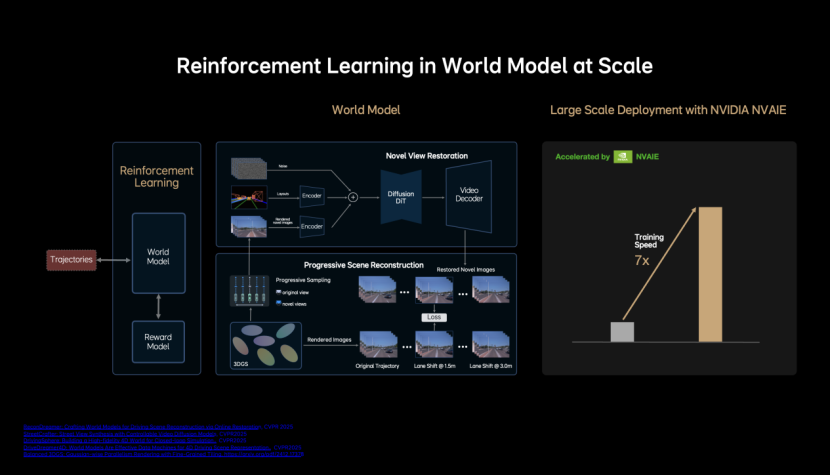
MindVLA基于自研的重建+生成云端统一世界模型,深度融合重建模型的三维场景还原能力与生成模型的新视角补全,以及未见视角预测能力,构建接近真实世界的仿真环境。源于世界模型的技术积累与充足计算资源的支撑,MindVLA实现了基于仿真环境的大规模闭环强化学习,即真正意义上的从“错误中学习”。过去一年,理想自动驾驶团队完成了世界模型大量的工程优化,显著提升了场景重建与生成的质量和效率,其中一项工作是将3D GS的训练速度提升至7倍以上。
理想还通过创新性的预训练和后训练方法,让MindVLA实现了卓越的泛化能力和涌现特征,其不仅在驾驶场景下表现优异,在室内环境也展示出了一定的适应性和延展性。
MindVLA用户价值
看到这里,很多朋友会问,MindVLA到底能给用户带来什么,答案很简单,和所有的自动驾驶技术一样,MindVLA终极目标是让汽车实现真正的自动驾驶,不同的是,MindVLA赋能的车不再只是一个驾驶工具,而是一个能与用户沟通、理解用户意图的智能体,能够听得懂、看得见、找得到,一个真正意义上的司机Agent,按照老李的理解,实际上MindVLA赋能的车是一个能够理解人类意图的智能机器人。
所谓“听得懂”,是说用户可以通过语音指令改变车辆的路线和行为,例如用户在陌生园区寻找超市,只需要通过理想同学对车辆说:“带我去找超市”,车辆将在没有导航信息的情况下,自主漫游找到目的地,车辆行驶过程中,用户还可以跟理想同学说开太快了、应该走左边这条路等等,汽车就能够按照驾驶员的意图执行这些指令,而在传统的自动驾驶中,这些是无法实现的。

“看得见”是指MindVLA具备强大的通识能力,传统的自动驾驶车辆只能识别汽车、行人等一般的障碍物,无法实现像人类一样精准的识别文字并进行理解,MindVLA赋能的车辆能够像人类一样认识星巴克、肯德基等不同商店招牌,当用户在陌生地点找不到车辆时,可以拍一张附近环境的照片发送给车辆,拥有MindVLA赋能的车辆能够搜寻照片中的位置,并自动找到用户。
“找得到”意味着车辆可以自主地在地库、园区和公共道路上漫游,其中典型应用场景是,用户在商场地库找不到车位时,可以跟车辆说:“去找个车位停好”,车辆就会利用强大的空间推理能力自主寻找车位,即便遇到死胡同,车辆也会自如地倒车,重新寻找合适的车位停下,整个过程不依赖地图或导航信息,完全依赖MindVLA的空间理解和逻辑推理能力。

看到这里,大家就会明白为何老李在说MindVLA是下一代的自动驾驶技术,因为和传统的自动驾驶相比,MindVLA更像是一个接近人类的智能体。
产业的重构
对汽车行业而言,像iPhone 4重新定义了手机,MindVLA也将重新定义自动驾驶,对于人工智能领域而言,汽车作为物理人工智能的最佳载体,未来探索出物理世界和数字世界结合的范式,将有望赋能多个行业协同发展。
在老李看来,并不是所有的车企都能够实现这一轮的转型,这背后需要庞大的资金、人才和技术的支撑。理想汽车每年研发投入超100亿元、近半数资金聚焦AI领域,理想构建了覆盖智能驾驶、理想同学、智能工业及智能商业的四维体系,形成“软件定义硬件、数据驱动进化”的新型产业范式。正如李想所言,理想汽车不是在做汽车的智能化,而是将人工智能汽车化,这种以AI为核心驱动力的企业基因,在智能化竞争中势必占据先发优势。
理想汽车的实践,不仅为中国汽车产业实现“弯道超车”提供范本,更在全球AI竞赛中标注出新的坐标,成为加速技术发展贡献了重要力量。可以相信,未来, MindVLA将为更多行业赋能,理想汽车也将成为全球领先的人工智能企业。
 声明:本文由太平洋号作者撰写,观点仅代表个人,不代表太平洋汽车。文中部分图片来源网络,感谢原作者。
声明:本文由太平洋号作者撰写,观点仅代表个人,不代表太平洋汽车。文中部分图片来源网络,感谢原作者。
 2.61万
2.61万 03-31
03-31 分享
分享 13 04-04
13 04-04 0 04-04
0 04-04 30 04-04
30 04-04 0 04-04
0 04-04 15 04-04
15 04-04 13 04-03
13 04-03 0 04-03
0 04-03 14 04-03
14 04-03 29 04-03
29 04-03 45 04-03
45 04-03
我来说两句